Pairing Heap
Operations
Find-Min
直接返回根节点
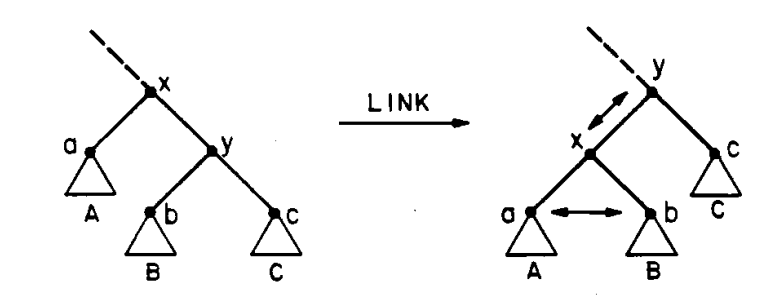
Meld
合并两个堆
把两个堆中权值小的根节点 作为根节点,把另一个根节点 作为儿子插入到这个节点
由于配对堆需要维护一个精巧的顺序,所以对一个节点,左边的儿子是最新加入的,右边是最早加入的
所以 插入到当前根节点 的儿子,把之前的儿子设为 兄弟即可
1
2
3
4
5
6
7
8
9
10
| template<typename T> Node<T>* meld(Node<T>* x, Node<T>* y){
if(!x) return y;
if(!y) return x;
if(x->value > y->value) swap(x, y);
y->sibling = x->child;
if(x->child) x->child->father = y;
x->child = y;
y->father = x;
return x;
}
|
insert
将新节点与原有堆合并
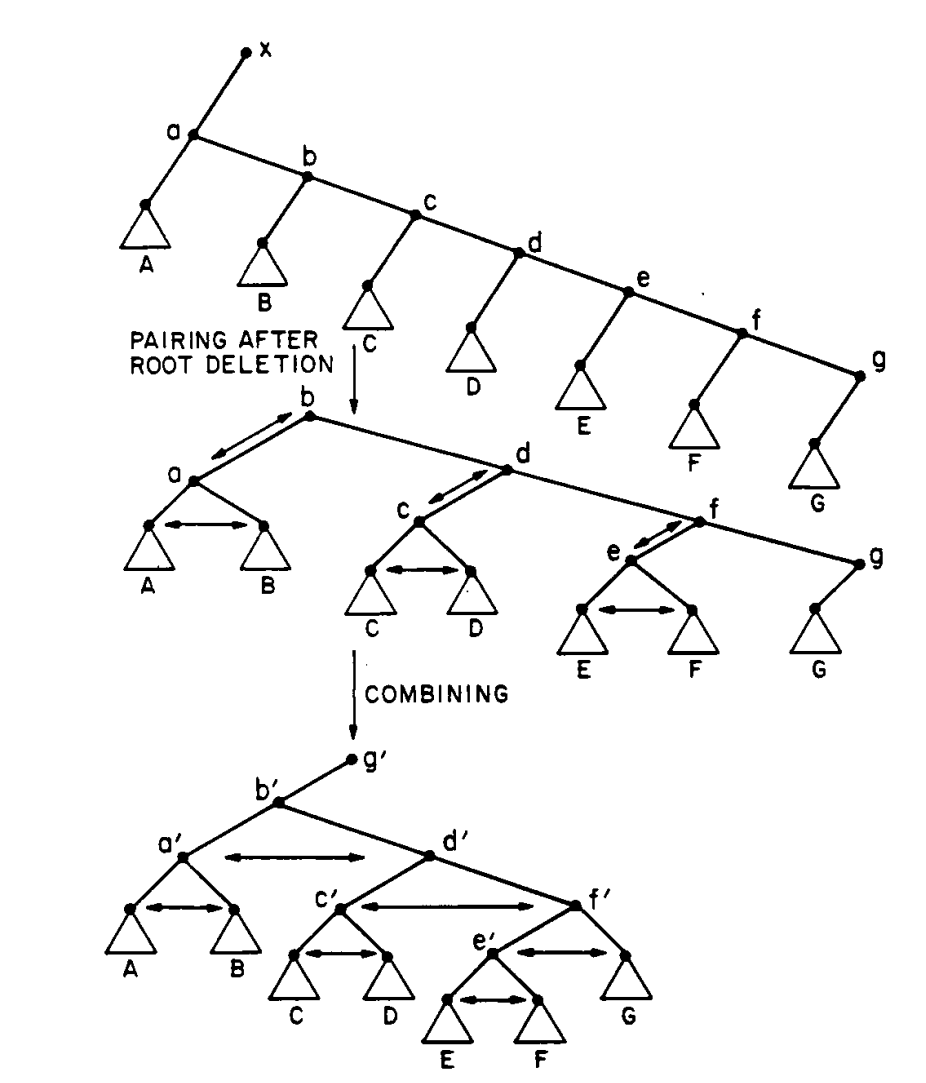
Merge
这个函数将节点 及其右边的兄弟合并成一个堆
我们希望先将两个堆两两配对合并成一个新的堆,再从右到左合并这些堆
递归地说,就是将当前两个堆合并,然后递归两个堆右边的所有堆,最后将合并的堆与递归的堆合并
1
2
3
4
5
6
7
8
9
10
| Node<T>* merge(Node<T>* x){
if(!x) return x;
x->father = NULL;
if(!x->sibling) return x;
Node<T>* y = x->sibling;
Node<T>* c = y->sibling;
y->father = NULL;
y->sibling = x->sibling = NULL;
return meld(merge(c), meld(x, y));
}
|
Delete-Min
将根节点删除,并将根的儿子进行 merge, 将得到的返回指针作为新的根
Decrease-Key
将节点 权值减小
由于权值减小不影响 的儿子与它的顺序,所以不用改 的儿子
只需要将 从它那一层抽出来,维护原有对结构,并将 与原有的堆合并即可
1
2
3
4
5
6
7
8
9
10
11
|
Node<T>* decrease_key(Node<T>* x, T value){
x->value = value;
if(x == root) return x;
if(x->father->child == x) x->father->child = x->sibling;
else x->father->sibling = x->sibling;
if(x->sibling) x->sibling->father = x->father;
x->sibling = x->father = NULL;
return meld(root, x);
}
|
Code
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
| #include<bits/stdc++.h>
using namespace std;
template<typename T>
class Pairing_Heap;
template<typename T>
class Node{
public:
T value;
Node<T>* child;
Node<T>* sibling;
Node<T>* father;
Node<T>(){}
Node<T>(T value) : value(value){child = NULL, sibling = NULL, father = NULL;}
friend class Pairing_Heap<T>;
};
template<typename T>
class Pairing_Heap{
public:
Node<T>* root;
Pairing_Heap<T>(){root = NULL;}
Node<T>* meld(Node<T>* x, Node<T>* y){
if(!x) return y;
if(!y) return x;
if(x->value > y->value) swap(x, y);
y->sibling = x->child;
if(x->child) x->child->father = y;
x->child = y;
y->father = x;
return x;
}
Node<T>* merge(Node<T>* x){
if(!x) return x;
x->father = NULL;
if(!x->sibling) return x;
Node<T>* y = x->sibling;
Node<T>* c = y->sibling;
y->father = NULL;
y->sibling = x->sibling = NULL;
return meld(merge(c), meld(x, y));
}
void insert(T value){
Node<T>* NewNode = new Node<T>(value);
root = meld(NewNode, root);
}
T find_min(){
return root->value;
}
Node<T>* erase_min(Node<T>* x){
Node<T>* t = merge(x->child);
delete x;
return t;
}
T delete_min(){
T ret = root->value;
root = erase_min(root);
return ret;
}
Node<T>* decrease_key(Node<T>* x, T value){
x->value = value;
if(x == root) return x;
if(x->father->child == x) x->father->child = x->sibling;
else x->father->sibling = x->sibling;
if(x->sibling) x->sibling->father = x->father;
x->sibling = x->father = NULL;
return meld(root, x);
}
};
|
复杂度证明
势能函数
与 Splay 的势能函数相同
其实这个堆 Tarjan 也参与了研究
你真是万恶之源
定义每个节点子树大小为
势能函数为
操作
对于 make_heap, find_min, 势能不变,所以都是均摊
操作
对于 insert, meld, decrease_key, 将一个堆连接到另一个堆根的儿子上,势能变化最大为
并且这些操作实际代价都是
所以这些操作都是均摊
delete_min 操作
实际代价
对于 delete_min, 把根删除势能减少为
另外把配对和配对后的所有堆顺序合并分开讨论
由于配对过程的连接操作至少与顺序合并过程的连接一样多
所以连接实际代价最大为 倍配对连接代价
设一共 对配对,所以代价最大为
另外除了连接的操作为
所以实际代价最大为
这里直接 , 因为势能函数里 足够大,所以实际代价和下面的势能变化都简化表示了
配对
对于配对,形式类似于下图:
假设 初始非空,势能变化为
同时由于 , 当 时取到
所以我们有:
同时因为
所以结合上式有
同时唯一可以使 为空的连接操作只有最后一个
势能变化最大为
将前 次势能变化 求和,再加上最后一次 得到:
由于
顺序合并
对于顺序合并, 形式类似于下图:
在讨论节点势能变化时,我们可以构造一个双射 使得对于除了合并后的根的所有点, 都有 , 表示合并后的节点子树大小
对于图中, 除了 , 其他节点都可以找到原图中比它子树大小大的节点
这是因为,一次合并的结果有两种,结构变和不变
结构变化后与树做了一次旋转是一样的:
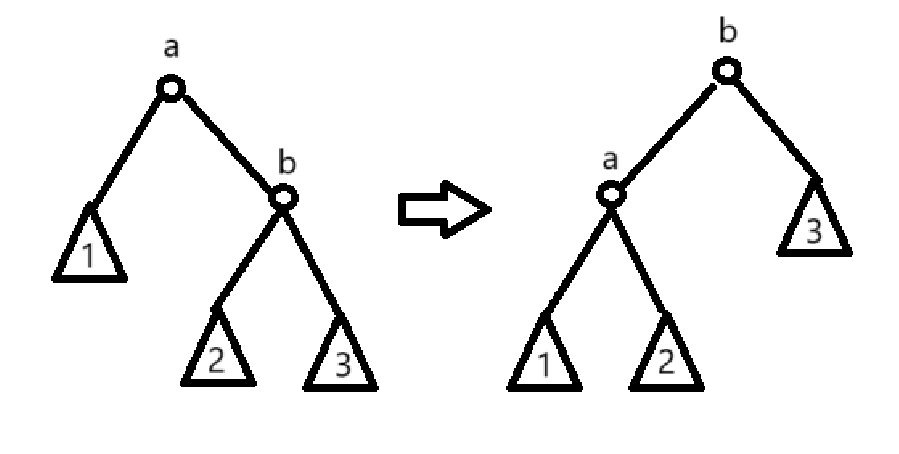
对于 子树势能不变
对于新的 , 它的大小不比原本的 大
所以只有新的根 增大
对于合并后的根, 势能最大为
其余节点在映射后势能不增
所以势能增大最大为
所以总的均摊代价为
所以 delete_min 均摊为
参考: 原论文
注: 原论文认为这个堆的各操作复杂度应该和 Fibonacci Heap 相同,只是他们只证明了除了 make_heap, find_min 以外的操作是 的
但是目前有证明说明 decrease_key 下界至少为